The zero command sets the zero angle for specified motor(s).
The syntax for the "zero" command is:
zero motor1 value1 motor2 value2 ...
where the zero angle for motor1 is value1, motor2 is value2, etc.
NOTE: the zero angle is defined in the
following way:
Let HA
be the hardware angle (the angle as contained in the motor controller), UA be the
user angle (this is the 'real' angle which has an offset angle included
- this is the angle that is reported from the program and on the Status
Display), and ZERO be the
zero angle. Then,
HA-zero=UA
Typing the zero command with no arguments will return the current zero
angles for all defined motors.
To avoid having to remember the definition of the zero angle, an alias (setpos)
has been written which will redefine the zero such that the current
position of a motor will be some given value.
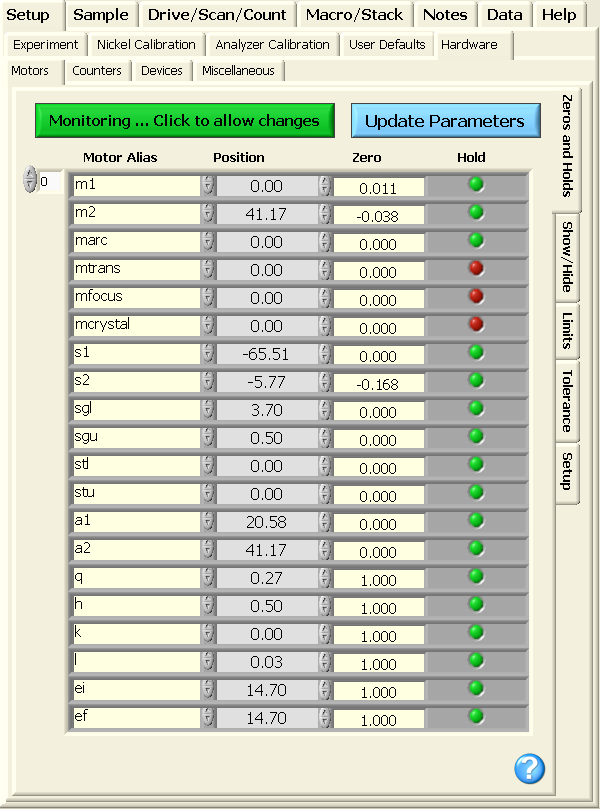
The zero angle can also be accessed from the GUI by
selecting the Zeros and Holds
tab from Setup
- Hardware - Motors tabs.. To set the zero angle for a given
motor, the green button at the bottom of the tab must be changed from "Monitoring ...
Click to allow changes" to "Changing ... click
to monitor". Type the
new zero angle into the Zero numerical control (For instance, in the
below image the zero angle for motor m1 is 0.011 degrees). Once
the zero angles of the motors are acceptable, the zero
command is issued by clicking on the blue Update Parameters
button.