The hold command holds a motor at its current position and prevents it
from being driven.
The syntax for the "hold" command is:
hold motor1 0/1 motor2 0/1 ...
where an argument of 1 holds the motor and 0 removes the hold.
The hold command with no arguments
will print out which motors are being held.
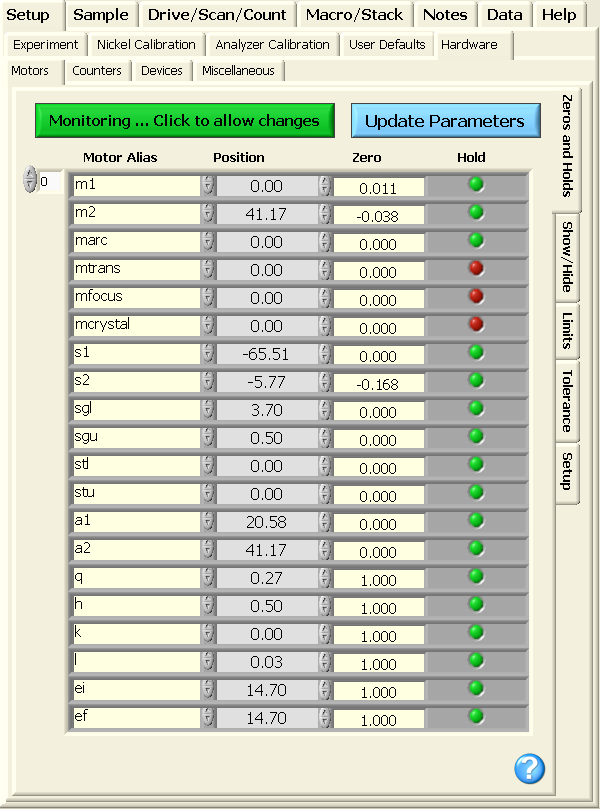
The hold command can also be accessed from the GUI by
selecting the Zeros and Holds
tab from the Setup
- Hardware - Motors tabs. To set
a hold for a given motor, the green button at the bottom of the tab must
be changed from "Monitoring
... Click to allow changes" to "Changing ... click
to monitor". Click on
the Hold
button to set or remove a hold for a given motor (a green light
means there is no
hold and a red light
means the motor is being held - in the image below, motors mtrans and mfocus are being held and all others
are not). Once the hold state of the motors is acceptable, the hold
command is issued by clicking on the blue Update Parameters
button.