The drive command will drive a series of motors (or pseudomotors
including q,h,k,l,e,ei,ef) to the specified position.
The syntax for the drive command is
drive motor1 value1 motor2 value2
...
Note: we have adopted a
scheme where all movable quantities are considered to be either a motor
or a pseudomotor. This includes physical motors, sample
environment parameters (i.e. temperature, pressure, magnetic field,
etc.), voltages (for flippers for instance) and reciprocal space and
energy parameters. This means that the same drive command can be
used to drive any of these values.
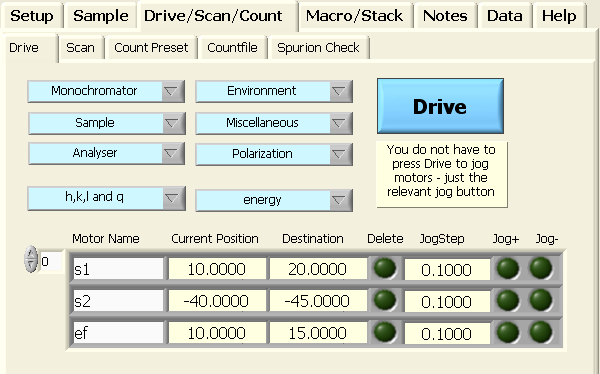
The drive command
can also be accessed from the GUI. The Drive tab is
found under the Motor/Scans
top-level tab. The motors and pseudomotors are ogranized into
categories for convenience. To add a motor to the list to be
driven, simply select it from the appropriate list. To delete a motor,
hit the relevant Delete
button. Type in the destination for each of the included motors
and hit the Drive
button to initialize the drive. For the example shown in the photo
below, motor s1 will be driven to 20 degrees, motor s2 to -45 degrees,
and ei to 15 meV. For repeated short moves, a Jog+ and Jog- button
will drive the relevant motor but the amount specified in JogStep.